Entwodiksyon nan Sistèm Kontwòl: Travay, Kalite ak Aplikasyon
Ou itilize sistèm kontwòl chak fwa yon machin kenbe yon valè fiks otomatikman, tankou tanperati, vitès, oswa nivo.Atik sa a eksplike kisa yon sistèm kontwòl ye, ki jan pati li yo travay ansanm, ak ki jan fidbak kenbe pwodiksyon an kòrèk.Ou pral wè tou kalite prensipal yo nan sistèm ak ki jan yo konpòte yo nan operasyon.Itilizasyon komen, benefis, ak limit yo enkli.Katalòg
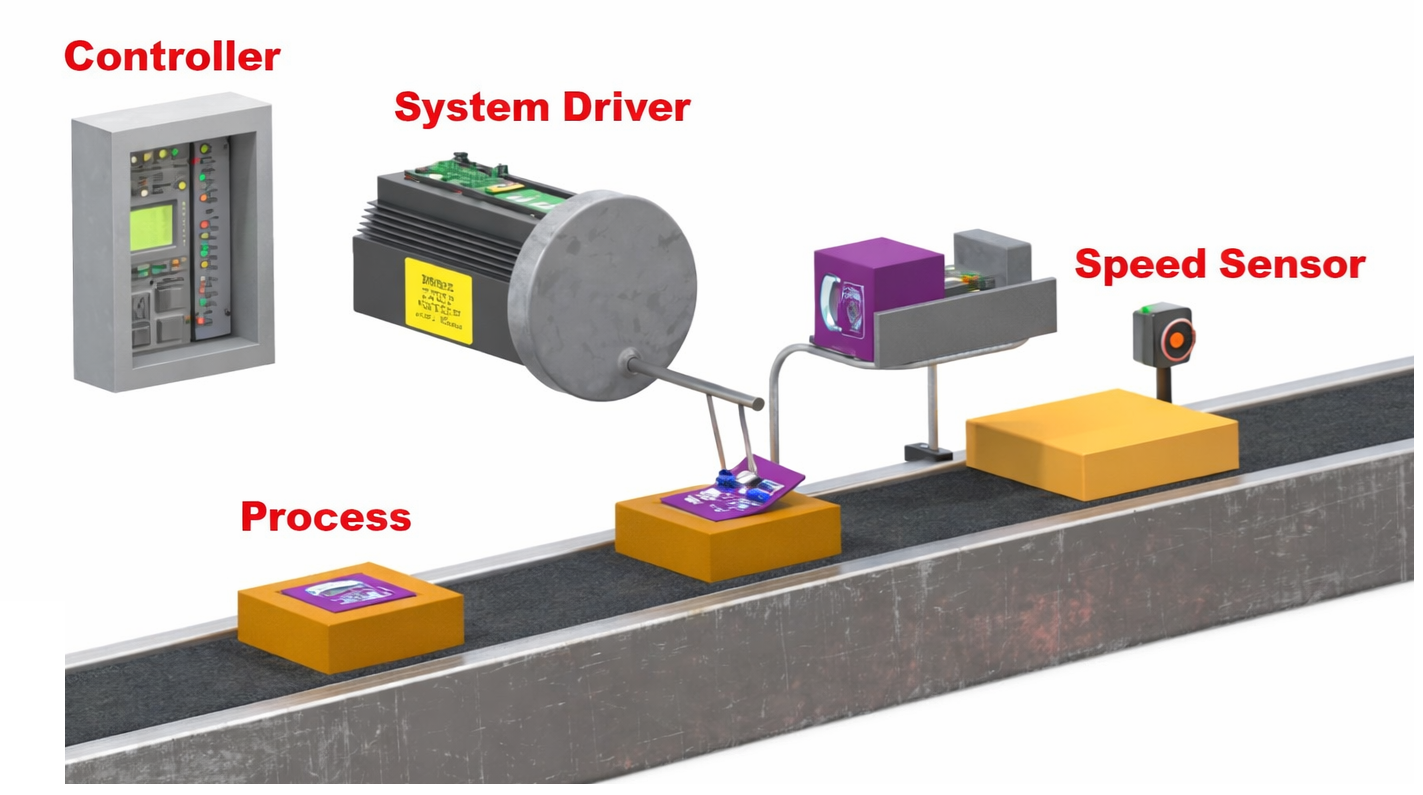
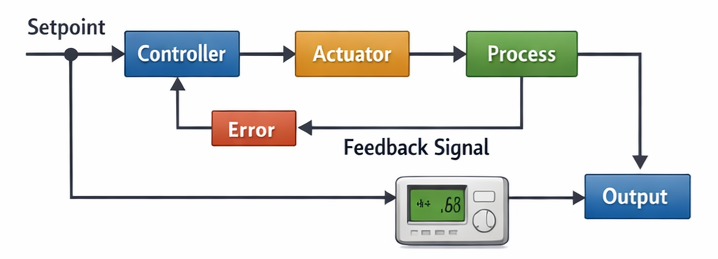
Figi 1. Egzanp sistèm kontwòl
Ki sa ki se yon sistèm kontwòl?
Yon sistèm kontwòl se yon sistèm ki kenbe yon valè mezire tou pre yon valè sib vle.Objektif li se otomatikman ajiste yon pwosesis pou pwodiksyon an rete kòrèk menm lè kondisyon yo chanje.Pou egzanp, yon tèmostat chanm kenbe tanperati tou pre nivo a mete, ak yon kontwòl kwazyè machin kenbe veyikil la nan yon vitès chwazi.Yon kontwolè nivo tank dlo tou kenbe wotè dlo a nan yon mak chwazi.An tèm senp, yon sistèm kontwòl kontinyèlman tcheke ak korije yon varyab matche ak valè ki nesesè yo.
Eleman debaz nan yon sistèm kontwòl
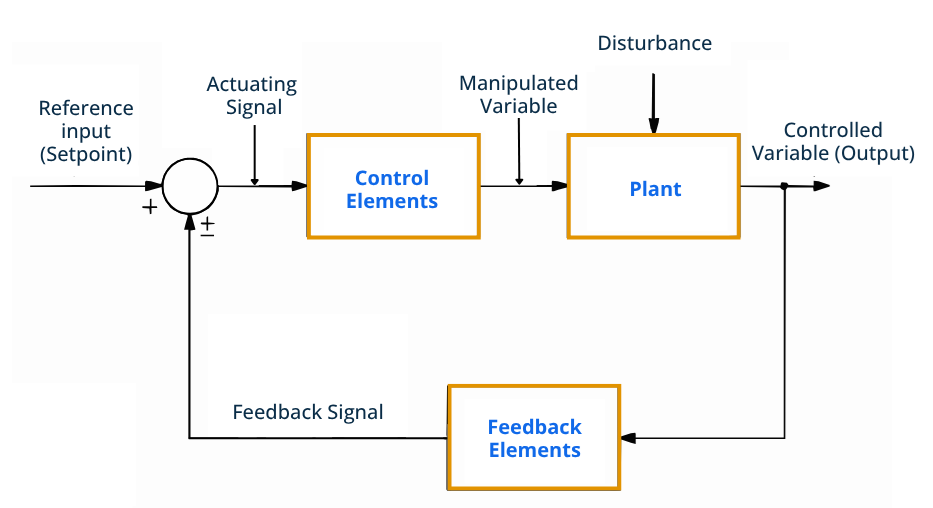
Figi 2. Dyagram blòk sistèm kontwòl
Yon sistèm kontwòl fèt ak plizyè pati estanda, chak fè yon travay espesifik.
• Antre Referans (Setpoint)
Sa a se valè a vle sistèm nan ap eseye kenbe.Li reprezante kondisyon sib yo chwazi a.Sistèm nan toujou konpare valè aktyèl la ak referans sa a.
• Aksyone siyal
Sa a se siyal la pwodwi apre konpare valè yo vle ak aktyèl.Li reprezante ki kantite ajisteman ki nesesè.Siyal la prepare sistèm lan pou koreksyon.
• Eleman kontwòl
Pati sa yo okipe pwosesis pou pran desizyon.Yo detèmine aksyon korektif la ki baze sou siyal la resevwa.Pwodiksyon an nan etap sa a prepare pwosesis la pou ajisteman.
• Varyab manipile
Sa a se kantite reglabl voye nan direksyon pwosesis la.Chanje valè sa a enfliyanse pwodiksyon final la.Li se varyab sistèm lan ka dirèkteman varye.
• Plant
Plant la se pwosesis la ke yo te kontwole.Li pwodui valè pwodiksyon final la.Sistèm nan gen pou objaktif pou kenbe pwodiksyon sa a nan nivo vle a.
• Twoub
Sa a se yon chanjman ki pa vle afekte pwosesis la.Li ka pouse pwodiksyon an lwen valè a vle.Sistèm nan dwe konpanse pou li.
• Varyab Kontwole (Sòti)
Sa a se rezilta aktyèl la mezire nan pwosesis la.Li montre kondisyon aktyèl sistèm lan.Objektif la se kenbe li egal ak opinyon referans la.
• Eleman Feedback
Sa yo mezire pwodiksyon an epi voye enfòmasyon tounen pou tcheke.Yo bay sistèm nan kondisyon aktyèl la.Sa a pèmèt koreksyon yo dwe detèmine.
• Siyal Feedback
Sa a se enfòmasyon ki retounen sou valè pwodiksyon an.Li reprezante kondisyon pwosesis la.Sistèm nan sèvi ak li pou konparezon.
Prensip travay sistèm kontwòl la
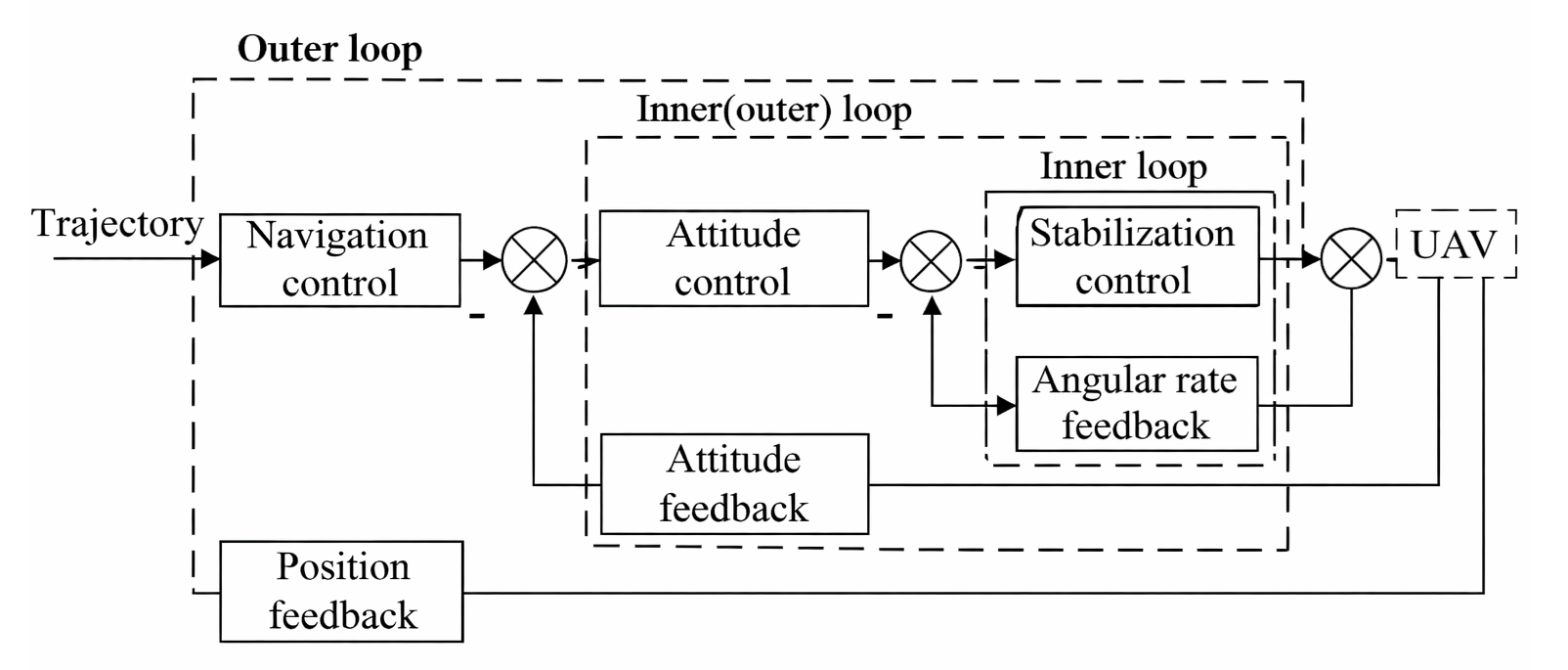
Figi 3. Prensip k ap travay nan sistèm kontwòl la
Prensip k ap travay nan yon sistèm kontwòl kòmanse ak yon valè opinyon vle ke yo te bay sistèm nan.Lè sa a, sistèm nan konpare valè sa a ak valè pwodiksyon aktyèl la.Diferans ki genyen ant yo rele siyal erè a.Si erè a egziste, sistèm nan jenere yon siyal koreksyon.Koreksyon sa a ajiste pwosesis la pou diminye erè a.Pwodiksyon an chanje epi yo tcheke ankò kontinyèlman.Sik la repete jiskaske pwodiksyon an byen matche ak valè vle a.
Karakteristik nan sistèm kontwòl
Sistèm kontwòl yo evalye selon kouman yo fè byen pandan operasyon an.Karakteristik sa yo dekri bon jan kalite ak fyab repons sistèm lan.
|
Karakteristik |
Deskripsyon |
|
Estabilite |
Sòti fè
pa diverge;retounen nan valè fiks apre twoub |
|
Presizyon |
Erè final ≤
± 2-5% nan valè mete |
|
Presizyon |
Sòti
varyasyon ≤ ± 1% anba menm opinyon |
|
Tan repons
|
Inisyal
reyaksyon rive nan tan delè mezire (td) |
|
Leve tan |
Tan soti nan 10%
a 90% nan valè final la |
|
Tan regleman |
Antre ak
rete nan ± 2% band |
|
Depase |
Pik depase
valè final pa kantite lajan |
|
Eta Etabl
Erè |
Konstan
konpanse ki rete apre estabilizasyon |
|
Sansiblite |
ΔSortie /
ΔParamèt chanjman rapò |
|
Robuste |
Kenbe
operasyon malgre chanjman twoub |
|
Bandwidth |
Opere
efektivman jiska -3 dB frekans koupe |
|
Repetebilite |
Menm opinyon
pwodui menm pwodiksyon nan tolerans |
|
Fyab |
Opere
san echèk pou tan opere rated (MTBF) |
|
Amortissement |
Osilasyon
dekonpozisyon detèmine pa rapò amortissement ζ |
|
Vitès nan
Repons |
Total tan pou
rive nan yon kondisyon ki estab |
Kalite Sistèm Kontwòl
Sistèm kontwòl yo klase selon fason yo okipe enfòmasyon, siyal, ak konpòtman repons.Yo gwoupe dapre itilizasyon fidbak, fòm siyal, ak konpòtman matematik.
Sistèm kontwòl Open-Loop
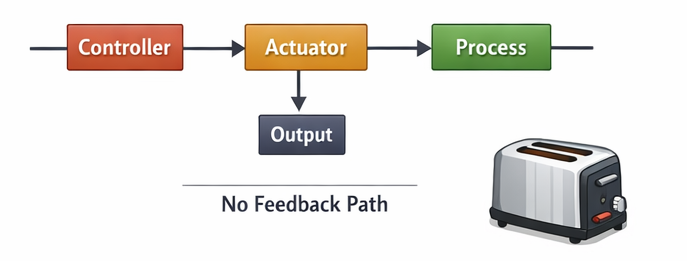
Figi 4. Dyagram Sistèm Kontwòl Open-Loop
Yon sistèm kontwòl louvri-bouk se yon sistèm kote pwodiksyon an pa enfliyanse aksyon kontwòl la.Sistèm nan voye yon kòmand epi sipoze rezilta a kòrèk san yo pa tcheke li.Paske pa gen okenn chemen fidbak, li pa ka otomatikman korije erè oswa latwoublay.Pèfòmans la depann sitou sou bon kalibrasyon ak kondisyon fonksyònman.Sistèm sa yo se senp, pri ki ba, epi fasil pou konsepsyon.Sepandan, chanjman nan chaj oswa anviwònman ka afekte rezilta final la.Egzanp komen yo enkli yon revèy griye elektrik, kontwòl revèy machin lave, ak revèy irigasyon fiks.
Sistèm kontwòl bouk fèmen
Figi 5. Dyagram sistèm kontwòl bouk fèmen
Yon sistèm kontwòl bouk fèmen se yon sistèm ki itilize fidbak pou ajiste pwodiksyon li otomatikman.Sistèm nan mezire rezilta a epi konpare li ak valè a vle.Si yon diferans parèt, yo aplike yon koreksyon pou diminye erè a.Ajisteman kontinyèl sa a pèmèt operasyon egzat ak ki estab menm lè kondisyon yo varye.Sistèm bouk fèmen yo bay pi bon presizyon ak fyab pase sistèm bouk louvri.Yo lajman itilize nan aplikasyon modèn kontwòl otomatik yo.Egzanp tipik yo enkli kontwòl tanperati èkondisyone, kontwòl kwazyè machin, ak regilatè vòltaj otomatik yo.
Sistèm kontwòl kontinyèl tan
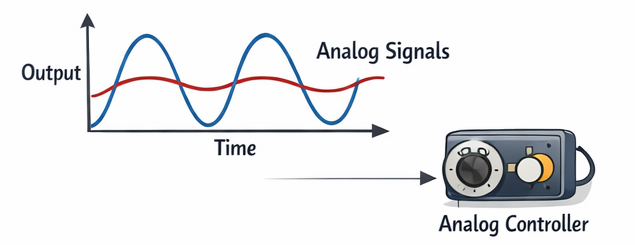
Figi 6. Kontinyèl-Tan (Analòg) Siyal Kontwòl
Yon sistèm kontwòl kontinyèl-tan trete siyal ki chanje san pwoblèm sou tan.Antre ak pwodiksyon egziste nan chak moman san entèripsyon.Sistèm sa yo anjeneral travay ak siyal analòg elektrik oswa mekanik.Paske siyal yo kontinyèl, repons lan se tou lis ak natirèl.Sistèm kontinyèl tan yo souvan jwenn nan kontwolè analòg tradisyonèl yo.Yo apwopriye pou pwosesis fizik ki mande reyaksyon imedya.Egzanp yo enkli regilatè vitès analòg, kontwòl volim anplifikatè odyo, ak kontwòl pozisyon valv idwolik.
Sistèm kontwòl diskrè-tan
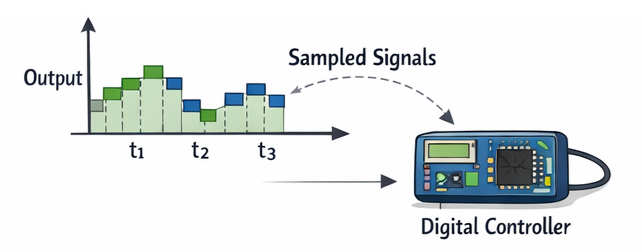
Figi 7. Siyal Kontwòl Disrè-Tan (Digital).
Yon sistèm kontwòl disrè-tan opere lè l sèvi avèk echantiyon siyal done yo.Sistèm nan tcheke ak mete ajou valè sèlman nan entèval tan espesifik.Siyal sa yo anjeneral trete pa kontwolè dijital oswa mikro.Pwodiksyon an chanje etap pa etap olye ke kontinyèlman.Sistèm sa yo pèmèt operasyon pwogramasyon ak ajisteman fleksib.Yo lajman itilize nan kontwòl modèn elektwonik ak òdinatè.Egzanp yo enkli kontwòl tanperati ki baze sou mikwo-kontwolè, kontwòl vitès motè dijital, ak tèmostat kay entelijan.
Sistèm kontwòl lineyè
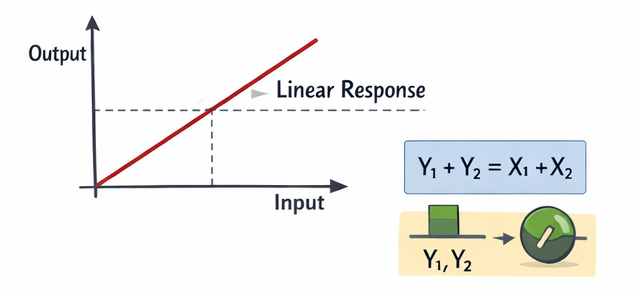
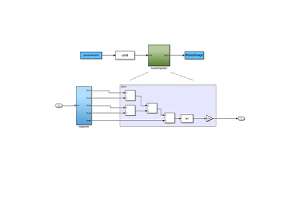
Figi 8. Sistèm lineyè Antre-Sòti Relasyon
Yon sistèm kontwòl lineyè swiv yon relasyon pwopòsyonèl ant opinyon ak pwodiksyon.Si opinyon an double, pwodiksyon an tou double nan menm kondisyon yo.Sistèm sa yo satisfè prensip sipèpozisyon an kote entrain konbine yo pwodui pwodiksyon konbine.Konpòtman lineyè pèmèt analiz matematik previzib ak fasil.Pifò konsepsyon kontwòl teyorik asime operasyon lineyè pou senplisite.Modèl lineyè ede nan konsepsyon sistèm ki estab ak egzat.Egzanp yo enkli anplifikatè elektwonik ti siyal ak rejyon kontwòl motè ki ba-chaj.
Sistèm kontwòl ki pa lineyè
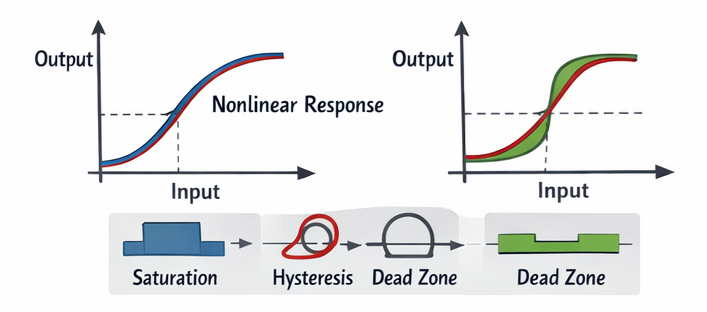
Figi 9. Karakteristik repons sistèm ki pa lineyè
Yon sistèm kontwòl ki pa lineyè gen yon pwodiksyon ki pa pwopòsyonèl ak opinyon an.Repons lan chanje selon ranje fonksyònman oswa kondisyon yo.Ti chanjman opinyon yo ka pwodui gwo varyasyon pwodiksyon oswa pa gen okenn chanjman nan tout.Efè tankou saturation, isterèz, ak zòn mouri souvan parèt.Sistèm sa yo pi difisil pou analize men yo reprezante pwosesis fizik yo pi byen.Anpil sistèm natirèlman konpòte yo nan yon fason ki pa lineyè.Egzanp yo enkli limit mouvman bra robotik, konpòtman actuator mayetik, ak kontwòl koule valv nan pozisyon ekstrèm.
Avantaj ak dezavantaj nan sistèm kontwòl
Sistèm kontwòl amelyore konsistans epi redwi efò manyèl, men tou prezante konpleksite ak pri.
Avantaj nan sistèm kontwòl
• Sistèm nan kenbe pwodiksyon an tou pre valè ki nesesè pandan operasyon an.
• Operatè yo pa bezwen kontinye ajiste ekipman an alamen.
• Machin yo ka kouri pou anpil èdtan san yo pa kanpe souvan.
• Sistèm nan korije chanjman nan kondisyon otomatikman.
• Estati operasyon yo ka tcheke nan yon panèl oswa ekspozisyon aleka.
Dezavantaj nan sistèm kontwòl
• Pri konfigirasyon pi wo pase sistèm manyèl senp yo.
• Yo bezwen travayè kalifye pou konfigirasyon ak sèvis.
• Detèktè ak pati elektwonik yo ka echwe sou tan.
• Jwenn kòz pwoblèm yo ka pran plis tan.
• Sistèm nan depann sou pouvwa elektrik ki estab.
Aplikasyon nan sistèm kontwòl
Sistèm kontwòl yo itilize nan tou de automatisation endistriyèl ak ekipman chak jou pou kenbe bon operasyon otomatikman.
1. Endistriyèl Faktori
Machin pwodiksyon kenbe dimansyon pwodwi ki konsistan ak bon jan kalite.Liy asanblaj otomatik yo sèvi ak règleman pou asire repetibilite.Sa a diminye fatra ak amelyore efikasite.
2. Règleman Tanperati
Ekipman chofaj ak refwadisman kenbe kondisyon anviwònman konfòtab.Bilding yo konte sou ajisteman otomatik pou estabilize klima andedan kay la.Sa a amelyore efikasite enèji ak konfò.
3. Sistèm Transpò
Veyikil yo sèvi ak kontwòl vitès ak estabilite pou operasyon pi douser.Machin modèn gen ladan kontwòl kwazyè ak sistèm traction.Sa yo amelyore sekirite kondwi ak pèfòmans.
4. Sistèm pouvwa
Rezo elektrik kontwole nivo vòltaj ak frekans yo.Jeneratè ajiste pwodiksyon pou matche ak demann chaj.Sa a asire rezèv elektrisite ki estab.
5. Robotics ak Otomatik
Robo fè pozisyon egzat ak travay mouvman.Machin otomatik yo opere kontinyèlman ak gwo presizyon.Sa a pèmèt manifakti avanse.
6. Ekipman medikal
Aparèy kenbe kondisyon fonksyònman kontwole pandan tretman an.Siveyans ekipman kenbe valè nan limit ki an sekirite.Sa a amelyore sekirite pasyan ak fyab.
7. Aparèy Kay
Aparèy chak jou otomatikman jere anviwònman operasyon yo.Machin lave ak frijidè kenbe kondisyon operasyon apwopriye.Sa a senplifye travay chak jou.
8. Sistèm Aerospace
Avyon ak dron kenbe kondisyon vòl ki estab.Gid otomatik kenbe oryantasyon kòrèk ak altitid.Sa a sipòte navigasyon serye.
Sistèm kontwòl vs automatisation vs sistèm entegre
Teknoloji sa yo gen rapò sere, men sèvi ak diferan rezon jeni nan pwodwi modèn elektwonik ak endistriyèl.
|
Karakteristik |
Kontwòl
Sistèm |
Otomatik |
Embedded
Sistèm |
|
Konsantrasyon prensipal la |
Règleman nan
varyab yo |
Pwosesis
ekzekisyon |
Aparèy
operasyon |
|
Objektif |
Kenbe
valè vle |
Fè travay
otomatikman |
Kouri dedye
fonksyon |
|
Dimansyon |
Espesifik
konpòtman pwosesis |
Tout antye
workflow
|
Selibatè
aparèy pwodwi |
|
Desizyon
Kapasite |
Baze sou
valè mezire |
Baze sou
lojik pwograme |
Baze sou
firmwèr |
|
Feedback Itilize |
Souvan
obligatwa |
Si ou vle |
Si ou vle |
|
Kalite Materyèl |
Detèktè ak
actuators |
Machin ak
contrôleur |
Mikwokontwolè
tablo |
|
Wòl lojisyèl |
Kalkil
ak koreksyon |
Sekans
ak kowòdinasyon |
Aparèy
lojik kontwòl |
|
Kalite Repons |
Kontinyèl
ajisteman |
Travay
ekzekisyon |
Fonksyonèl operasyon |
|
Gwosè sistèm |
Ti pou
mwayen |
Mwayen pou
gwo |
Trè piti |
|
Fleksibilite |
Modere |
Segondè |
Limite |
|
Tan
Egzijans |
Segondè |
Modere |
Segondè |
|
Aplikasyon
Nivo |
Nivo pwosesis |
Nivo plant |
Nivo pwodwi |
|
Egzanp |
Tanperati
kontwòl |
Faktori
liy pwodiksyon an |
Smart gade |
|
Entegrasyon |
Pati nan
automatisation |
Gen ladann
sistèm kontwòl |
Sipòte tou de |
Konklizyon
Sistèm kontwòl kenbe estabilite lè yo kontinyèlman konpare pwodiksyon aktyèl la ak yon valè sib epi korije nenpòt erè.Pèfòmans yo depann sou eleman debaz tankou fidbak, aksyon kontwolè, ak pwosesis la kontwole.Diferan klasifikasyon defini kijan siyal yo okipe ak ki jan presizyon yon sistèm reponn a twoub.Akòz kapasite sa yo, sistèm kontwòl yo lajman aplike nan endistri, transpò, enèji, aparèy medikal, ak ekipman chak jou.
Sou nou
ALLELCO LIMITED
Li piplis
Quick Inquiry
Tanpri voye yon ankèt, nou pral reponn imedyatman.
Kesyon yo poze souvan [FAQ]
1. Ki diferans ki genyen ant yon kontwolè ak yon sistèm kontwòl?
Yon kontwolè se sèlman aparèy pou pran desizyon (tankou yon kontwolè PLC oswa PID).Yon sistèm kontwòl gen ladan kontwolè a plis detèktè, actuators, ak pwosesis la ke yo te reglemante.
2. Ki sa ki se kontwòl PID ak poukisa li enpòtan?
Kontwòl PID sèvi ak aksyon pwopòsyonèl, entegral ak dérivés pou minimize erè rapidman ak fèt san pwoblèm.Li amelyore estabilite, presizyon, ak vitès repons nan pifò sistèm endistriyèl yo.
3. Poukisa sistèm kontwòl pafwa osile oswa lachas?
Osilasyon rive lè koreksyon yo twò agresif oswa anreta.Akor pòv, detèktè ralanti, oswa benefis twòp lakòz pwodiksyon an depase repete.
4. Ki sa ki saturation actuator?
Saturasyon actuator rive lè actuator a rive nan limit fizik li epi li pa ka ogmante pwodiksyon an plis.Sa a anpeche sistèm nan korije gwo erè.
5. Ki jan sistèm kontwòl yo jere reta nan pwosesis yo?
Yo itilize metòd akor, filtè, oswa algoritm prediksyon pou konpanse pou lag pou koreksyon an rive nan bon moman.

4.7 kΩ Gid Rezistans: Kòd Koulè, Itilizasyon, Tès & Konparezon Valè
sou 2026/02/16

Miniature Circuit Breaker (MCB): Prensip Travay, Kalite, Evalyasyon & Gid Seleksyon
sou 2026/02/15
Posts popilè
-

Enstriksyon konplèks Set Odinatè: Ki jan yo chanje informatique?
sou 8000/04/18 147776
-

USB-C pinout ak karakteristik
sou 2000/04/18 112022
-
Sèvi ak Xilinx Inifye Simulation Primitif: Yon Gid konplè nan FPGA Design ak Simulation
sou 1600/04/18 111351
-
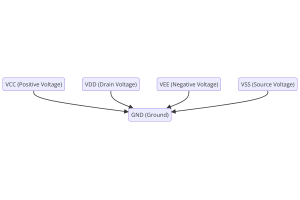
Tansyon ekipman pou pouvwa nan elektwonik: siyifikasyon VCC, VDD, VEE, VSS, ak GND
sou 0400/04/18 83777
-

RJ45 Connector Gid: Pinout, fil elektrik, Kalite Kab, ak Itilizasyon
sou 1970/01/1 79575
-
Gid la ultim nan kòd koulè fil nan sistèm elektrik modèn
Fason sistèm elektrik nou yo itilize koulè yo pa sèlman pou sanble.Chak koulè fil kounye a endike yon fonksyon espesifik, fè li pi fasil yo idantifye ak okipe konpozan elektrik kòrèkteman pandan en...sou 1970/01/1 66964
-

Purge Valv Gid: Fonksyon, sentòm, tès, ak ranplasman pou pèfòmans motè optimal
Valv la weteur se yon pati enpòtan nan sistèm yon machin nan ki ede kenbe lè a pwòp pa jere vapè gaz yo anvan yo ka chape anba nan atmosfè a.Sa a pa sèlman ede anviwònman an pa diminye polisyon, me...sou 1970/01/1 63104
-
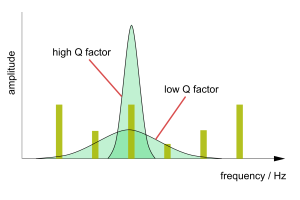
Kalite (q) Faktè: Ekwasyon ak aplikasyon
Faktè bon jan kalite a, oswa 'Q', se enpòtan lè tcheke ki jan byen endukteur ak rezonan travay nan sistèm elektwonik ki itilize frekans radyo (RF).'Q' mezire ki jan byen yon sikwi minimize pèt enèj...sou 1970/01/1 63041
-
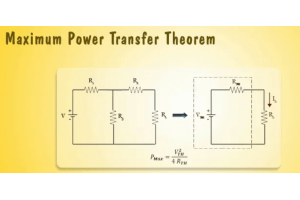
Atenn pèfòmans pik ak teyorèm nan transfè pouvwa maksimòm
Teyorèm maksimòm transfè pouvwa a eksplike kijan enèji ki sòti nan yon sous, tankou yon batri oswa dèlko, ap koule nan yon chaj ki konekte.Li montre kondisyon an egzak kote chaj la resevwa pouvwa k...sou 1970/01/1 54097
-

Espesifikasyon batri A23 ak konpatibilite
Batri a A23 se yon ti, silenn ki gen fòm batri ak vòltaj segondè.Yo te rele tou 23a, 23AE, oswa MN21, li kouri nan 12 vòlt ak pi wo pase AA oswa AAA pil.Konsepsyon espesyal li fè li pafè p...sou 1970/01/1 52189
Nimewo pati cho
-

MMBD4148TW-7-F
Diodes Incorporated
DIODE ARRAY GP 75V 150MA SOT363
NCP706MX22TAG
onsemi
IC REG LINEAR 2.2V 1A 8XDFN
EMK105BJ473MV-F
Taiyo Yuden
CAP CER 0.047UF 16V X5R 0402
LPC4337JBD144E
NXP USA Inc.
IC MCU 32BIT 1MB FLASH 144LQFP
P2106UALRP
Littelfuse Inc.
THYRISTOR 170V 150A 6SMD GW
ADNS-5030
Broadcom Limited
SENSOR OPTICAL MOUSE 8-DIP
CSD18541F5T
Texas Instruments
MOSFET N-CH 60V 2.2A 3PICOSTAR
ATH016A0X43-SR
ABB Power Electronics Inc.
DC DC CONVERTER 0.8-3.6V 58W
AT29LV1024-15TC
Microchip Technology
IC FLASH 1MBIT PARALLEL 48TSOP
TLC252BCDR
Texas Instruments
IC CMOS 2 CIRCUIT 8SOIC
CD4024BCM
onsemi
IC BINARY COUNTER 7-BIT 14SOIC
TIP121
Fairchild Semiconductor
TRANS NPN DARL 80V 5A TO220AB
MC33GD3000EPR2
NXP USA Inc.
IC MOTOR DRIVER 6V-58V 56QFN
MX7581LN+
Analog Devices Inc./Maxim Integrated
IC DAS 8BIT 15K 28DIP
SP339BER1-L/TR
MaxLinear, Inc.
IC TXRX FULL/HALF 3/5 40QFN
SN74368AN
Texas Instruments
IC 6-BIT BUFFER/LINE DRVR 16-DIP
LTC2600CGN#PBF
Analog Devices Inc.
IC DAC 16BIT V-OUT 16SSOP
TPS62356YZGR
Texas Instruments
IC REG BUCK ADJ/PROG 1A 12DSBGA -

MAX1805MEE
Analog Devices Inc./Maxim Integrated
IC TEMP SENSOR MULTI-CHAN 16QSOP
FAR-F6KB-1G9600-B4GP-Z
Taiyo Yuden
FILTER SAW 1.96GHZ 5SMD
PZM5.1NB2,115
NXP USA Inc.
DIODE ZENER 5.1V 300MW SMT3
12101U1R3BAT2A
KYOCERA AVX
CAP CER 1.3PF 100V NP0 1210
TSC2300IPAG
Texas Instruments
IC SCREEN CNTRL 12BIT 64TQFP
LCMXO1200C-4FTN256I
Lattice Semiconductor Corporation
IC FPGA 211 I/O 256FTBGA
BZM55B27-TR
Vishay General Semiconductor - Diodes Division
DIODE ZENER 27V 500MW MICROMELF
SMBJ13CA
Littelfuse Inc.
TVS DIODE 13VWM 21.5VC DO214AA
ESD7351HT1G
onsemi
TVS DIODE 3.3VWM SOD323
IMC1210ER2R2J
Vishay Dale
FIXED IND 2.2UH 320MA 1 OHM SMD
PIC16C620A-04I/SO
Microchip Technology
IC MCU 8BIT 896B OTP 18SOIC
TPS7A2045PDQNR
Texas Instruments
300-MA, ULTRA-LOW-NOISE, LOW-IQ,
TPIC6595DWRG4
Texas Instruments
IC PWR 8-BIT SHIFT REGIS 20-SOIC
UA78L08CD
Texas Instruments
IC REG LINEAR 8V 100MA 8SOIC
ADA4431-1YCPZ-RL
Analog Devices Inc.
IC AMP FILTER 16LFCSP
SN74HC574DW
Texas Instruments
IC FF D-TYPE SNGL 8BIT 20SOIC
BLF2012LL98R2400A
Pulse Electronics
FILTER BALANCED BALUN WLAN
SLW20R-1C7LF
Amphenol ICC (FCI)
CONN FFC FPC BOTTOM 20POS 1MM RA -

1SMB30CAT3G
Littelfuse Inc.
TVS DIODE 30VWM 48.4VC SMB
LTC2907ITS8#TRPBF
Analog Devices Inc.
IC SUPERVISOR 2 CHANNEL TSOT23-8
M27C512-15F6
STMicroelectronics
IC EPROM 512KBIT PARALLEL 28CDIP
MMSZ5227B-7-F
Diodes Incorporated
DIODE ZENER 3.6V 500MW SOD123
AT27C010-70JI
Microchip Technology
IC EPROM 1MBIT PARALLEL 32PLCC
0157010.DR
Littelfuse Inc.
FUSE BRD MNT 10A 125VAC/VDC SMD
0603YG105ZAT4A
KYOCERA AVX
CAP CER 1UF 16V Y5V 0603
ST72F63BE2M1
STMicroelectronics
IC MCU 8BIT 8KB FLASH 24SOIC
5SGXMABK2H40I2N
Intel
IC FPGA 696 I/O 1517HBGA
NCP698SQ25T1G
onsemi
IC REG LINEAR 2.5V 150MA SC82AB
HUF75623P3
Fairchild Semiconductor
MOSFET N-CH 100V 22A TO220-3
AD5541JRZ-REEL7
Analog Devices Inc.
IC DAC 16BIT V-OUT 8SOIC
CSBFB700KJ58-R1
Murata Electronics
CER RESONATOR SMD
QMK212B7222KD-T
Taiyo Yuden
CAP CER 2200PF 250V X7R 0805
FIN1027M
Fairchild Semiconductor
IC DRIVER HALF 2/0 8SOIC
MIC4690YM
Microchip Technology
IC REG BUCK ADJUSTABLE 1A 8SOIC
GRM2165C2A751JA01D
Murata Electronics
CAP CER 750PF 100V C0G/NP0 0805
UPD720200F1-DAK-A
Renesas Electronics America Inc
USB 3.0 HOST CONTROLLER V